It has always been the idea to create a real hybrid instrument and not an acoustic instrument with some extra sliders and buttons. In this sense existing hybrid trumpets did not always appeal to me and some of the others were to directly linked to the trumpet playing itself. I wanted the extra sensors to have the capability of expressive use. Most of the sensors can also be touched while I am playing. Whether I succeeded in accomplishing the expressive part is also very dependent on the sound design and mapping.
Sensors (in order of implementation on the instrument.
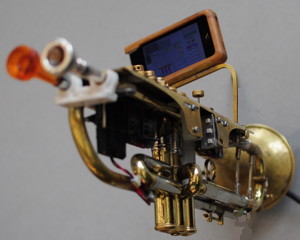
Original Electrumpet:
Recording buttons / mode buttons (right hand):


Old (top) and new (bottom) recording / mode switch buttons. Top standard switches with knobs glued on top. Bottom self made pressure sensors in a copper housing with the same knobs on top.
There are four buttons with which I can record channels. At first I used normal on/of switches for this but I changed this to pressure sensors used like a Schmitt trigger to have less ‚clicking noises’. The sensors are close to the normal valves of the trumpet. The pressure sensors are ‚home made’ from fabric with a little bit of felt added in the contraption for better haptic feedback. They can be used for both recording on/off as for mode switches per channel (four). For a future version I’d like to implement an extra button for „recording off” on the left thumb because it is hard to stop the recording while playing at the moment.
Electronic valves (sliders with a spring):

Two of the digital valves on the Electrumpet (old version)
In the beginning when I developed the electrumpet I thought that having extra valves would allow me transfer my playing dexterity on the normal valves to some kind of dexterity in an electronic sense. I still have not had the idea to accomplish though other then making just an electronic trumpet…. At the moment these valves (the same valves) are used to scroll through recorded sounds. These sounds can be played both chaotically and in a loop. With the valve I can determine beginning and end points of loops, chaotic buffer playback or stop playing (gesture). It is my intention to have other ‚selection methods’ on the valves in the future when I implement for example concatenate playing of recorded samples that are analyzed (audio descriptors and segregation through onset detection).
Thumb switches (right thumb):

three of the thumb switches. The other three are on the aluminium holder that we see from the back.
These are six switches operating in pairs. three switches for louder / more tone shaping / speed up and three switches for softer / less tone shaping / speed down. These buttons were there from the start. In the second version of the trumpet they are mounted much more stable.
transposition pressure sensors (left hand pointing and middle finger):

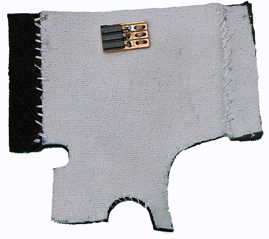
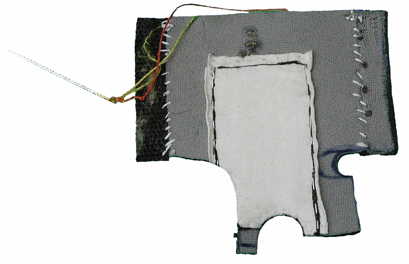
Old pressure sensors (standard FSR’s) and new fabric pressure sensors (the bottom two pictures front and back).
These sensors are on the third valve and they are made from fabric. Originally I used ‚normal’ FSR’s but they were to vulnerable in a bending situation. The sensors change over time. In the next version of the electrumpet they should be fitted out with an opamp amplifying system to have better sensitivity.
Added during the years:
‚Electronic’ mouthpiece:

Plastic mouthpiece with pressure sensor in the first version of the Electrumpet. In the second version the sensor is part of the PCB board.
The Electronic mouthpiece is actually a plastic marching band mouthpiece in combination with a pressure sensor and is used to make envelopes on recorded material. In a musical situation I mostly use it to play recorded bass note frequencies with good timing (the latency is mostly better compared to live transposition and another advantage is that the original note can not be heard). Transposition value and average envelope value can be frozen by using the electronic valves.
Ribbon controller:


Back and frontside of the plastic holder carrying the infrared sensor and the ribbon controller.
The ribbon controller is used for discrete but varying selections during playing. In one of the modes the number of notes frozen in a spectral delay can be determined in another mode I switch between different harmonization sets (within a superset determined by number / arranging style).
Infrared sensor:
Adding this sensor was a big help in the clarity of the instrument to the public. The fact that people could clearly see me manipulate the sound at least with one sensor helped them understand / accept other electronic actions much better. This sensor is mainly used for filtering actions (which is similar to the way a plunger mute is used when playing acoustic). Current filtering actions are wahwah and formants. The filtering style changes dynamically based on the noisiness of the sound signal.
Microphone:
Of course the microphone was used already at the very beginning of the Electrumpet but it was not used as a sensor. I use a microphone (Shoeps CMC6 with a supercardioid capsule) on a stand. The stand enables me to play with the distance. At the moment the pitch, the volume and the noisiness as well as onset detection are used to control the sound processing. In order to have less latency some of these measurements should be done on the Electrumpet. See future additions.
Future additions / changes:
Replace the infrared sensor with the gestic:
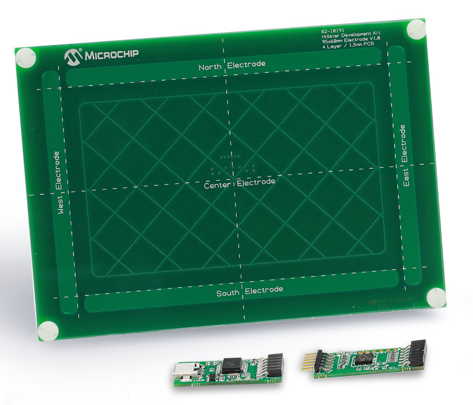
Gestic Hillstar development KIT that I am experimenting with.
the gestic is a sensor that works much like a theremin but it does so in three dimensions. It can measure the distance of objects to five electrodes and is thus able to give a 3D position of a hand relative to the sensor whereas the infrared sensor only measures distance. Other advantages above the infrared sensor: higher sample frequency (2 ms vs 30 ms) and not susceptible to disturbances from theater lights (which mostly emit a lot of infrared radiation). Research is needed to see if the gestic has other practical issues in a professional context. The gestic communicates through I2C.
Add an internal microphone:
I am still contemplating the best way to place this microphone and which microphone to use other then a simple electret microphone. Good suggestions are welcome.
The most important aspect of having a microphone on the instrument is to be able to gate the sound. Drum sounds especially are picked up by the microphone also when you don’t want them to be picked up. Apart from that a few other things can be improved by doing the sound processing on the trumpet (onset and preferably pitch detection for really fast reaction to new notes which is beneficial for less transposition latency).
Add a 9-axis position and acceleration sensor:
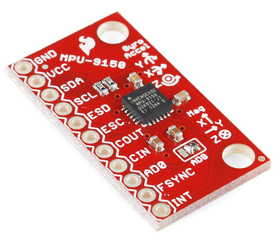
MPU-9150 breakout from Sparkfun (https://www.sparkfun.com/products/11486) which might be my 9-axis sensor.
Although I was not much in favor of implementing a sensor that could measure my movements in the beginning (I was afraid that it would restrict me to much), I now think it could be a nice addition in some cases. Such a sensor will most probable communicate through I2C or SPI.
Replace the ribbon controller with a capacitive sensor? and maybe add one to have two on top of each other?:
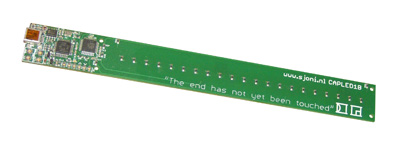
Brand new capacitive touch slider from Sjoni (www.sjoni.nl) which might be the next slider sensor.
This is a relatively new idea. With the capacitive sensor I can measure the position before I touch the sensor. This might be handy when you want to look for a certain (pre)set without already triggering it. It would be nice to have two of them as well above each other.